编号:CDUT-2023-63
标题:Improved forward and backward adaptive smoothing algorithm
入藏号:WOS:000708918800001
中国科学院文献情报中心期刊分区:工程技术1区TOP(2022)
本校作者:林旭;李威
来源出版物:GPS SOLUTIONS 卷: 26 期: 1 文献号: 2
出版年:2022
第一地址:成都理工大学
关键词:Kalman filter;Smoothing;Adaptive;Abnormal dynamic models
代表图:
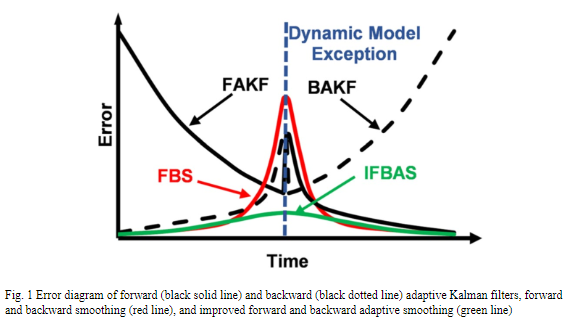
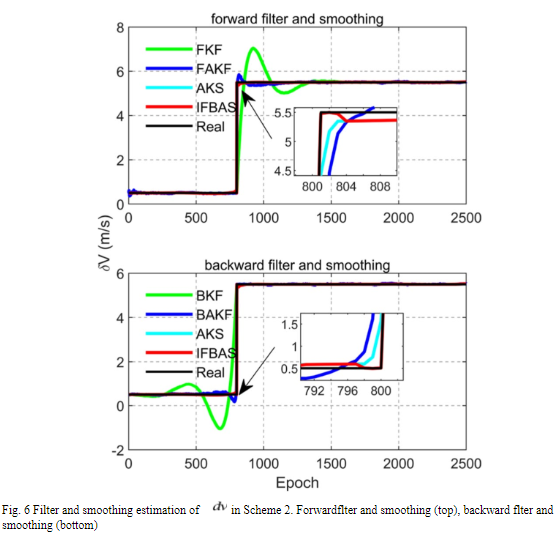
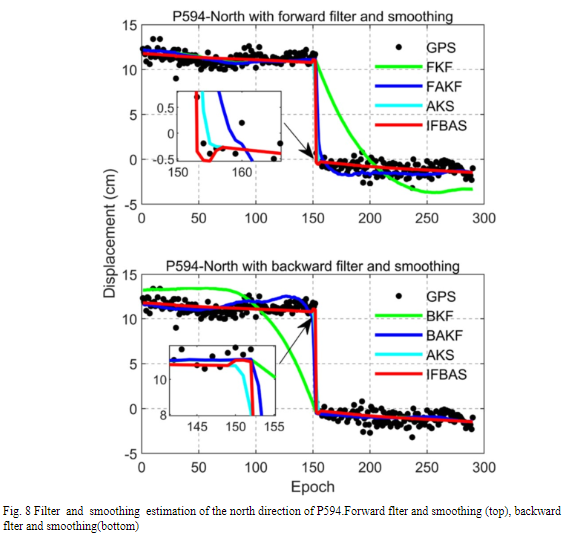
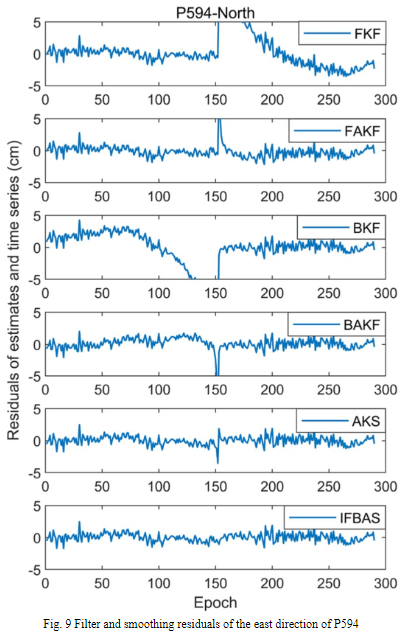
摘要:Kalman smoothing algorithms are widely used in offline data processing in target tracking systems to improve filter calculations accuracy. The essence is weight averaging in forward and backward Kalman filters. When there is an abnormal dynamic model in the system, the adaptive Kalman filter algorithm can reduce its impact on the filter results to a certain extent. Nevertheless, because there are various methods for selecting adaptive factors and all of them are complicated, it is difficult to select the optimal adaptive factors. Therefore, the forward filter and backward filter results are suboptimal when a dynamic model abnormality occurs, which, in turn, causes the smoothing accuracy to decrease after the weighted average before and after this abnormality. We propose an improved forward and backward adaptive smoothing (IFBAS) algorithm. During the smoothing process, adaptive factors of the forward adaptive Kalman filter and the backward adaptive Kalman filter are used to modify the covariance information twice to reduce the influence of suboptimal filter information on smoothing accuracy. We apply the IFBAS algorithm to the GPS/INS integrated navigation system and data postprocessing of the GNSS network. The results of simulation experiments and time series of IGS station analysis examples show that the IFBAS algorithm can effectively suppress the influence of abnormal dynamic models and improve smoothing accuracy.
文章链接地址: https://link.springer.com/article/10.1007/s10291-021-01185-0



